晚上睡觉前,真的是容易焦虑的时间。
早上起的晚,磨了两个咖啡片,浓缩萃取四倍,加冰,做成冰美式。
切两份生鱼片。燕麦,和打奶泡。早午饭
下午爸妈不在,因为听了一首非常的流行音乐,“受够了太bad天气,阴晴不定”,都是weather你,拿了吉他扒谱,不小心玩了快三个小时。
没有好好科研。我很自责。
我真的要努力搞了,没有退路了。
好在晚上出门,有真的认真科研了。
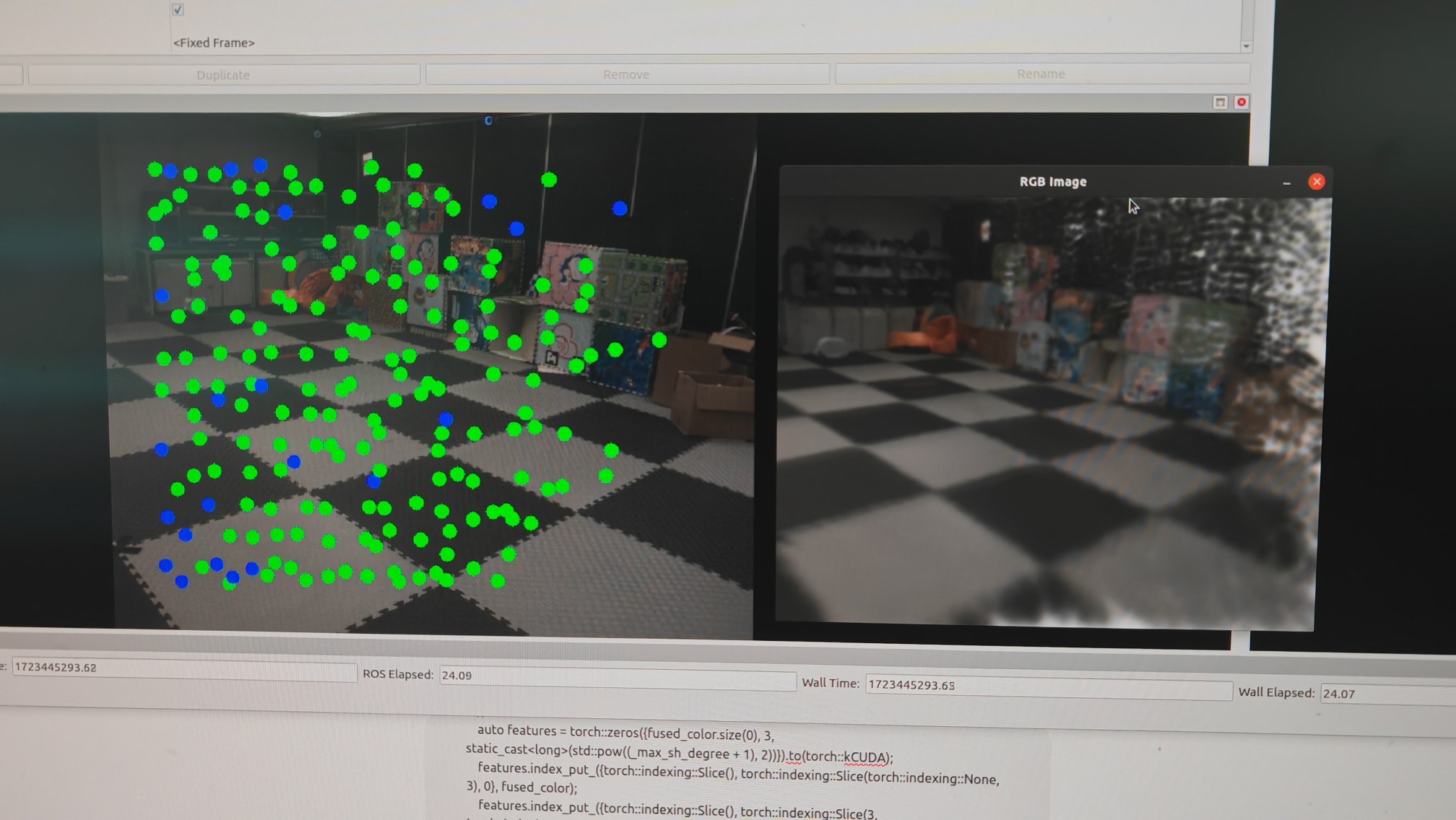
思考的问题也想明白了,光流的问题。
后面想清楚了,点,可以 从先验 或者历史过来,无所谓,其实都,只是提供了一个选点的问题而已。投射在当前帧选点,根据shituomashi得分来选点,很好,后面基本不用改。
金字塔,可以照用不误。避免陷入局部最优。
我相信,这一定是未来机器人感知里面,最优雅的地图形式。
然后用先验位姿渲染。然后在当前帧图片去索引图片。这样就知道先验位姿和当前帧点云的误差。我真的绝顶聪明。
还有解决加点的问题。但是还是没有处理好 删除点的问题。
然后什么时候能做成里程计呢。真的要好好想想。PSNR提升重要,但是里程计同样重要。
我一定要成为世界上第一个做出来的。
没有人会记住第二个。
现在,全世界只有我能做。
如果不抓住机会。那么机会就没有了。
sheng,加油。
所有人都可能抛弃你,但是爸爸妈妈没有,一定不要让他们失望。
评论: